The Hierarchical System1 / System2 Architecture in Robotics and AI Agents
- Oct 25, 2025
- 2 min read
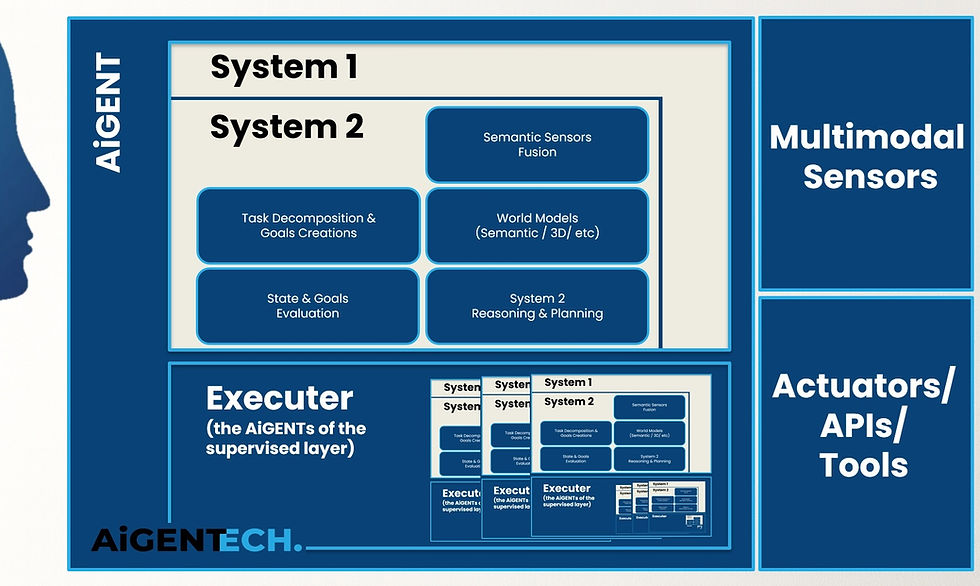
At AiGENT-TECH, we design robotic intelligence the way the human brain organizes thought, through a hierarchical architecture combining System1 (fast, intuitive) and System2 (slow, deliberate) reasoning. In this structure:
System1 handles rapid, reflexive reactions, perception, balance, and real-time motion.
System2 manages deliberate reasoning, planning, decision-making, and long-term strategy.
Each Executer layer acts as an AiGENT for the layer above, translating cognitive intent into precise action through actuators, tools or APIs.
Every sensory input flow through the hierarchy, which dynamically decides which layer and which “system” should respond.
Example 1 – Robot Playing Chess on a Physical Board
A robotic arm plays chess against a human.
System2 performs strategic reasoning, evaluating positions, predicting outcomes, and deciding the next move.
System1 of the same hierarchy assists in state evaluation, recognizing piece patterns, spatial layouts, and board changes.
The Executer translates System 2’s intent (“move knight to F3”) into torque, grip, and motion control for real execution.
Example 2 – Robot Playing Chess in the Virtual World
Now the same agent plays online in a digital chess platform.
Perception becomes digital, actuators become API commands.
System2 still reasons over strategy, while System1 of the same hierarchy supports fast board-state checks and pattern detection.
The Executer executes via virtual interfaces instead of motors.
The hierarchy remains identical, only the medium changes from atoms to bits.
How the Cognitive Flow Works
Sensors capture input: vision, force, sound, or digital streams.
The system decides which layer processes the input:
System1: reacts instantly and commands actuators directly.
System2: interprets, plans, and sends goals to the Executer, which applies the same recursive logic at its own level.
Cross-use within the same hierarchy:
System2 may invoke System1 during planning, e.g., state evaluation in chess or local motion estimation, to accelerate reasoning with intuitive insight. This interplay makes the architecture both reactive and deliberative, switching fluidly between fast reflex and deep reasoning, the core of Physical-AI.
Hierarchical Multi-Robot & Multi-Agent Planning
The same principle scales naturally across teams of robots and intelligent agents.
Each robot or subsystem functions as an Executer-Agent under a shared supervisory System2 layer.
Local System1 loops manage reflexes, collision avoidance, balance, grasping.
A global System2 planner coordinates multi-robot missions, resource allocation, task sequencing, and cooperative decision-making.
Within each robot, the same recursion continues local decisions can call their own System1 or System2 routines.
This results in distributed yet hierarchical intelligence, where reasoning cascades downward and feedback flows upward, maintaining coherence across hundreds of agents.
From a single robot arm to a fleet of autonomous systems, the same cognitive pattern applies: System2 orchestrates goals, System1 ensures stability and reaction, and every Executer becomes the AiGENT of its supervising layer.
That’s the foundation of AiGENT-TECH’s Physical-AI OS, a universal architecture that unifies perception, reasoning, and coordinated action across both single robots and multi-agent ecosystems.



Comments